Robotic Control Research
At Menlo, we’re pushing the boundaries of robotic control through innovative AI approaches. Our research focuses on developing novel frameworks that enable more intuitive, efficient, and robust control of robotic systems, particularly in complex manipulation tasks.
Research Projects
Poseless (Mar 2025)
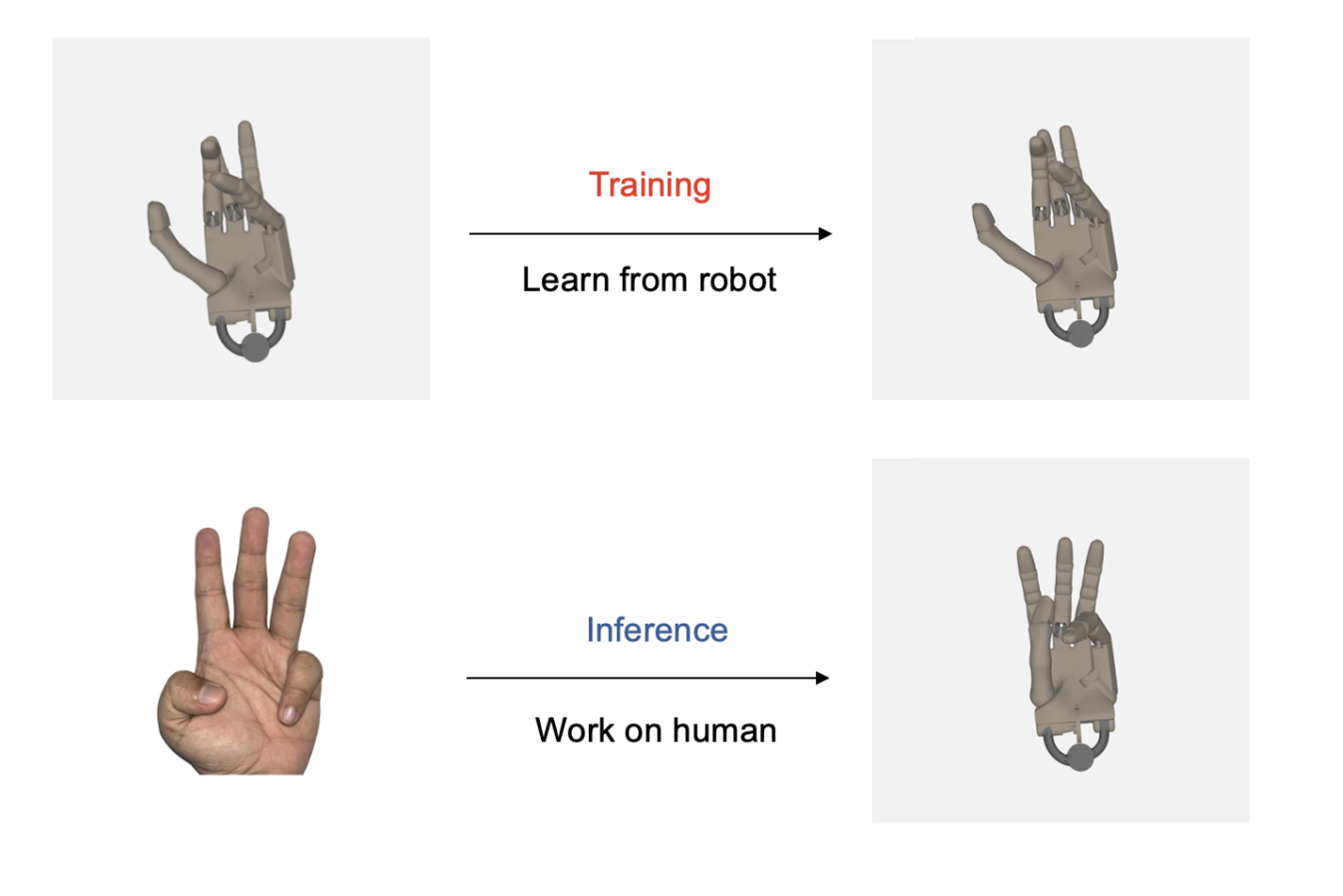
🤖 PoseLess: Vision-Based Robotic Hand Control Without Pose Estimation
PoseLess is a groundbreaking framework that revolutionizes robot hand control by eliminating the need for explicit pose estimation. By directly mapping 2D images to joint angles using projected representations, PoseLess enables more intuitive and efficient control of robotic hands. This innovative approach opens new possibilities for robotics, prosthetics, and human-robot interaction, achieving robust performance through synthetic data training and cross-morphology generalization.
Links:
- Paper: https://arxiv.org/abs/2503.07111
- GitHub: https://github.com/janhq/poseless
- HuggingFace: https://huggingface.co/homebrewltd/Poseless-3B
- Dataset: https://huggingface.co/datasets/jan-hq/robot-hand-poses-round-to-2